哈工大机器人智能制造有限公司 410100
摘要:本文介绍一种利用机器人配合激光视觉的鱼雷罐自动插拔系统,通过激光视觉来检测鱼雷罐插头,可精准确定插头的位置坐标,再配合专用的插拔机构和机器人的高柔性,可实现鱼雷罐插头的自动插拔。应用效果表明,该系统可满足当前钢厂鱼雷罐插拔取电的需要,系统稳定可靠。
关键词:鱼雷罐、机器人、插拔机构、自动插拔系统、激光视觉
目前钢厂鱼雷罐插拔取电,基本上是靠人工来实现的,劳动强度大,现场有很多铁鳞,环境恶劣。而且鱼雷罐内装的是钢水,温度高,存在烫伤的风险。工人需要带石棉手套来防护高温,但这样操作限制了手灵活性,很不方便。夏天尤其难受,相当于在30多度高温环境中有个大火炉,工作期间,汗流浃背。所以将鱼雷罐插拔改为机器人来操作,实现自动化,迫在眉睫。
鱼雷罐是装铁水的容器,通过专用运输火车实现铁水的较远程转运,将铁水从炼铁厂高炉运到炼钢厂倒灌间。到了倒灌间,通过旋转机构将鱼雷罐旋转,从而将铁水倒出。一个鱼雷罐本体加上里面的钢水重量约300-400吨,旋转需要的电机功率较大,而专用运输火车上没有大功率电力供应,需要通过外部取电,采用插头的方式连接。
目前基本上采用的是人工的方式来实现(如图1所示)。该工作环境,温度高且有大量铁鳞,工作劳动强度大,当前做该工作岗位的人员,绝大部分是60后,部分70后,年轻人不愿意干,企业面临用工风险。另外从人文方面考虑,也迫切需要改造。
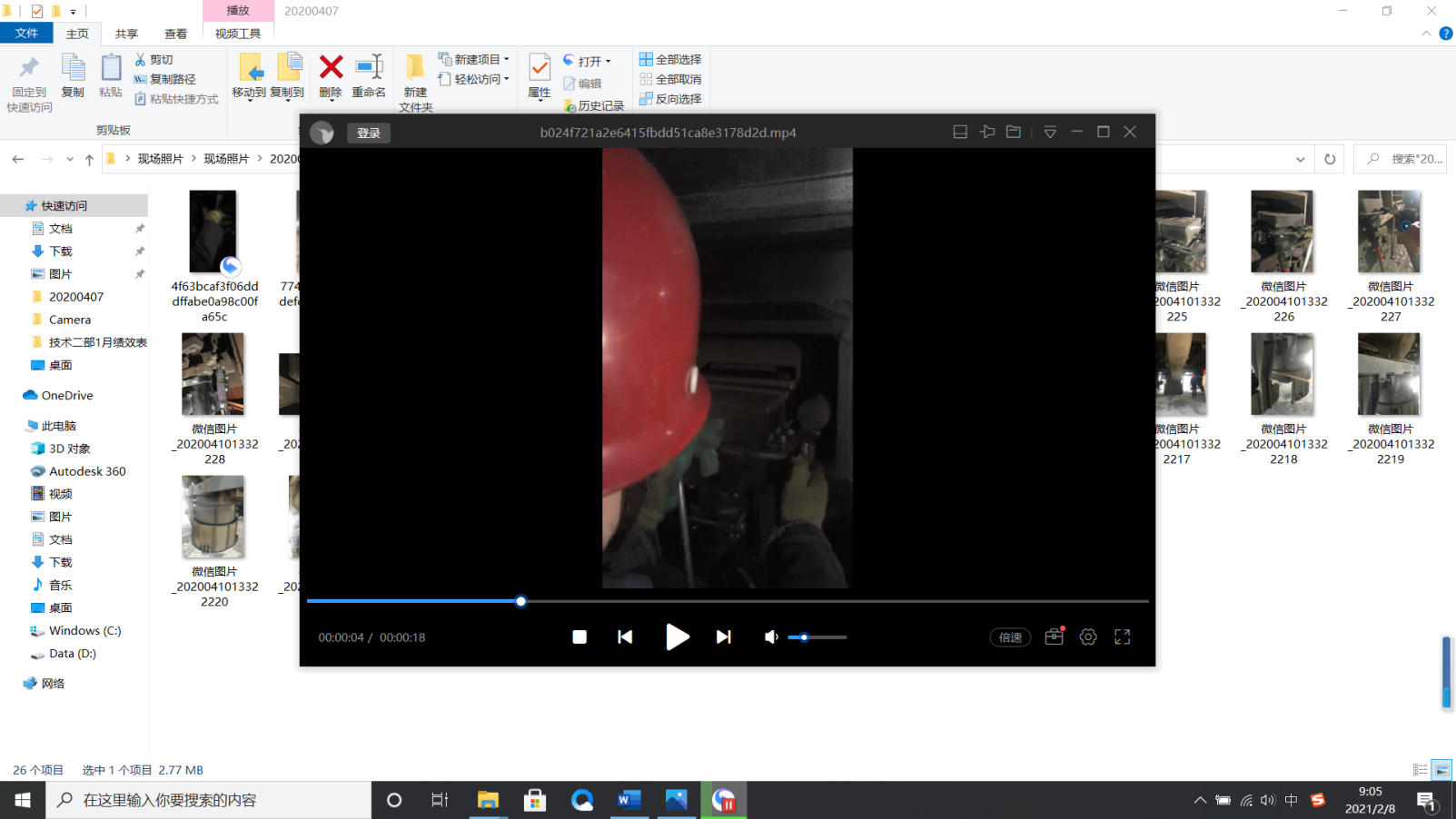
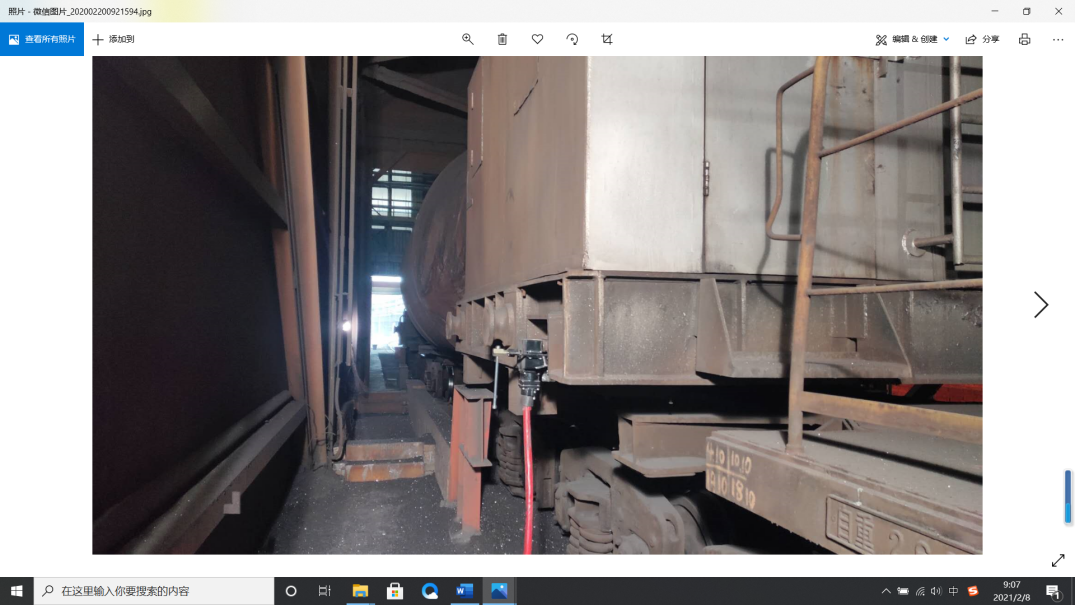
图1 人工插拔
鱼雷罐自动插拔,需要解决几个难点:
鱼雷罐专用运输货车本身车体差异、停车位置的差异、插头母头的尺寸差异等,使得鱼雷罐车上的插头母头的位置不确定;
鱼雷罐车的插头公头和母头的连接和锁紧方式,是按人工操作的便捷性来设计的,不便于采用自动化的方式,增加插拔机构的设计难度。
为解决前述所提到的难点,采用激光视觉来检测鱼雷罐车上插头公头的位置,配合机器人及特殊设计的插拔机构,可实现鱼雷罐自动插拔取电。本自动插拔系统充分发挥激光视觉和机器人两者优势,激光视觉不需要外部光源,可适用各类天气状况,不受光线强弱变化的影响;机器人柔性好,可执行复杂动作;稳定性高,能适用恶劣的工作工作,维护成本及工作量少;工作半径大,可满足各类鱼雷罐车的自动插拔工作。
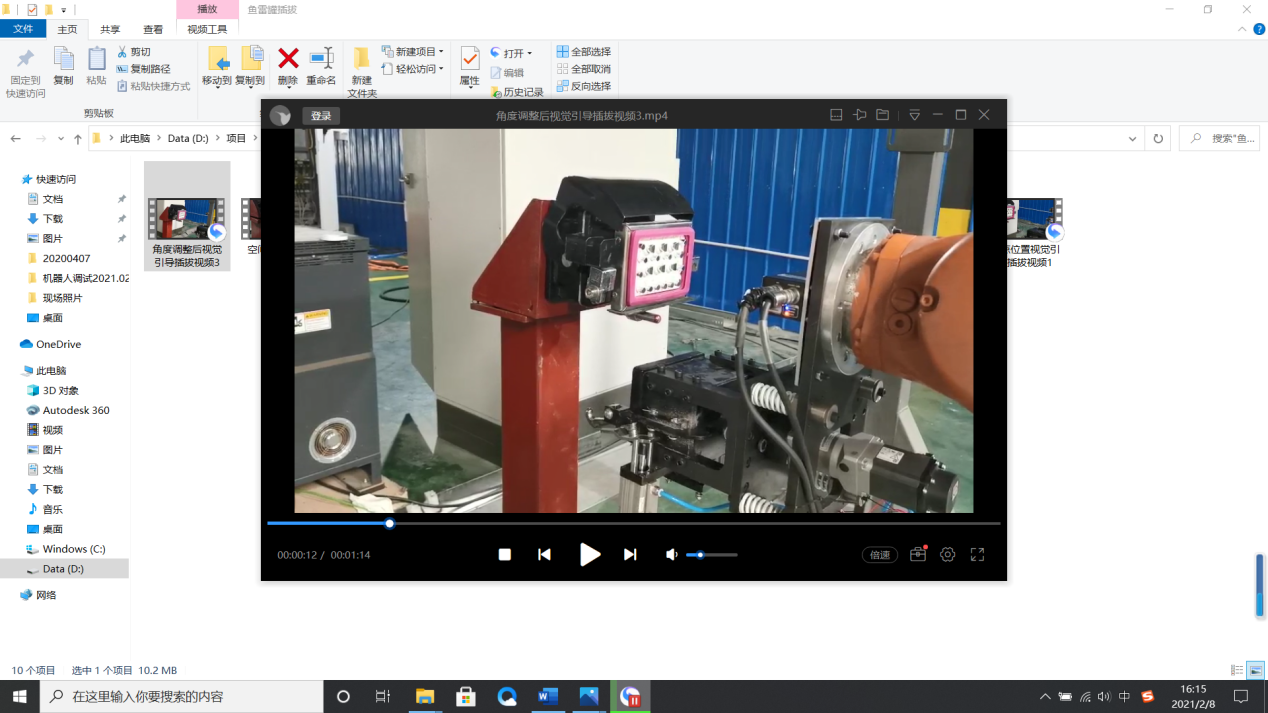
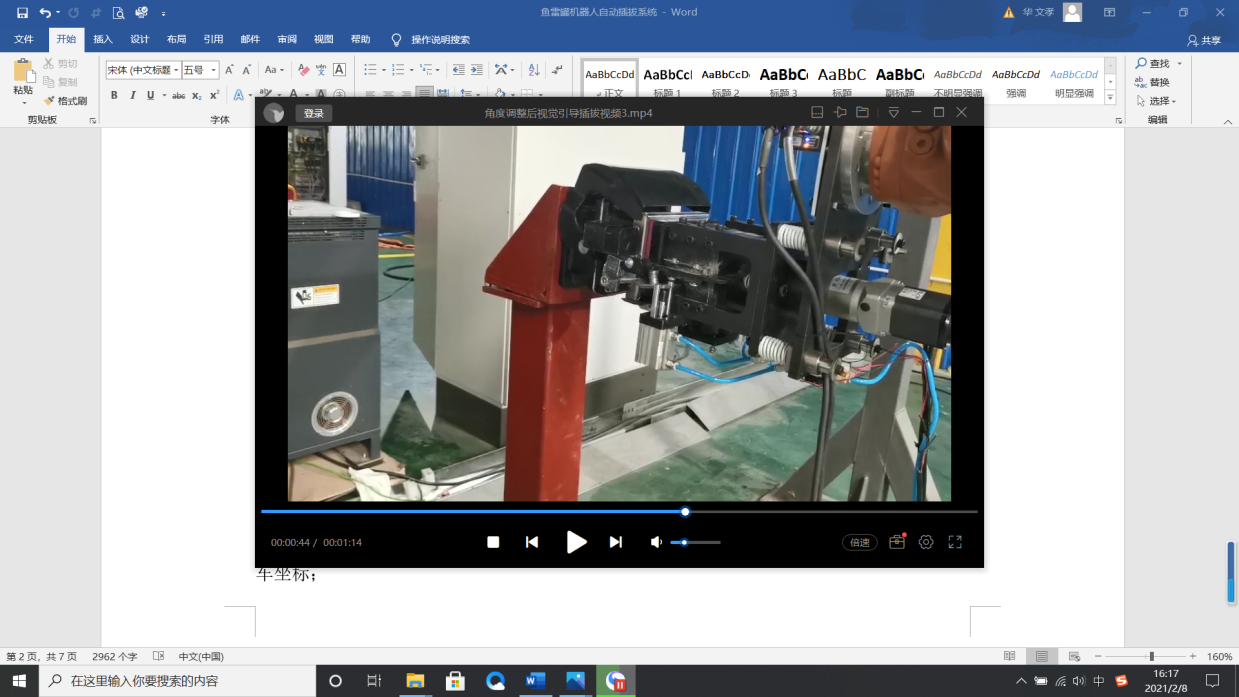
图2机器人自动插拔
系统工作流程如下:
1)、当鱼雷罐车到达倒灌间,系统车身位置检测部分提示、引导司机将车停靠在指定位置,保证鱼雷罐车在轨道方向的偏差保证在±300毫米;
2)、激光视觉系统对鱼雷罐车进行扫描,找出插头母头位置,并计算出坐标值;
3)、机器人根据激光视觉给定的坐标运动至指定位置,将插头公头和母头对齐;
4)、锁扣气缸向上动作,压缩弹簧;
5)、伺服电机启动,带动螺杆旋转,到达指定的力矩后,电机停止,锁紧机构处于锁紧状态;
6)、鱼雷罐车旋转系统检测到通电信号后,系统启动,倾倒罐内铁水,完成后发信号给机器人自动插拔系统 ;
7)、伺服电机启动,带动螺杆旋转,旋转锁紧时对应的圈数,将螺杆退出,锁紧机构处于放松状态;
8)、锁扣气缸向下动作,弹簧复位;
9)、机器人退回原位,完成一次插拔作业。
鱼雷罐机器人自动插拔系统主要由:插拔机构、机器人系统、激光视觉系统和控制系统等组成。插拔机构执行端与插头公头连接,固定端通过连接法兰与机器人法兰连接,激光视觉安装在插拔机构连接法兰上。

激光系统







插头公头
插拔机构
机器人系统
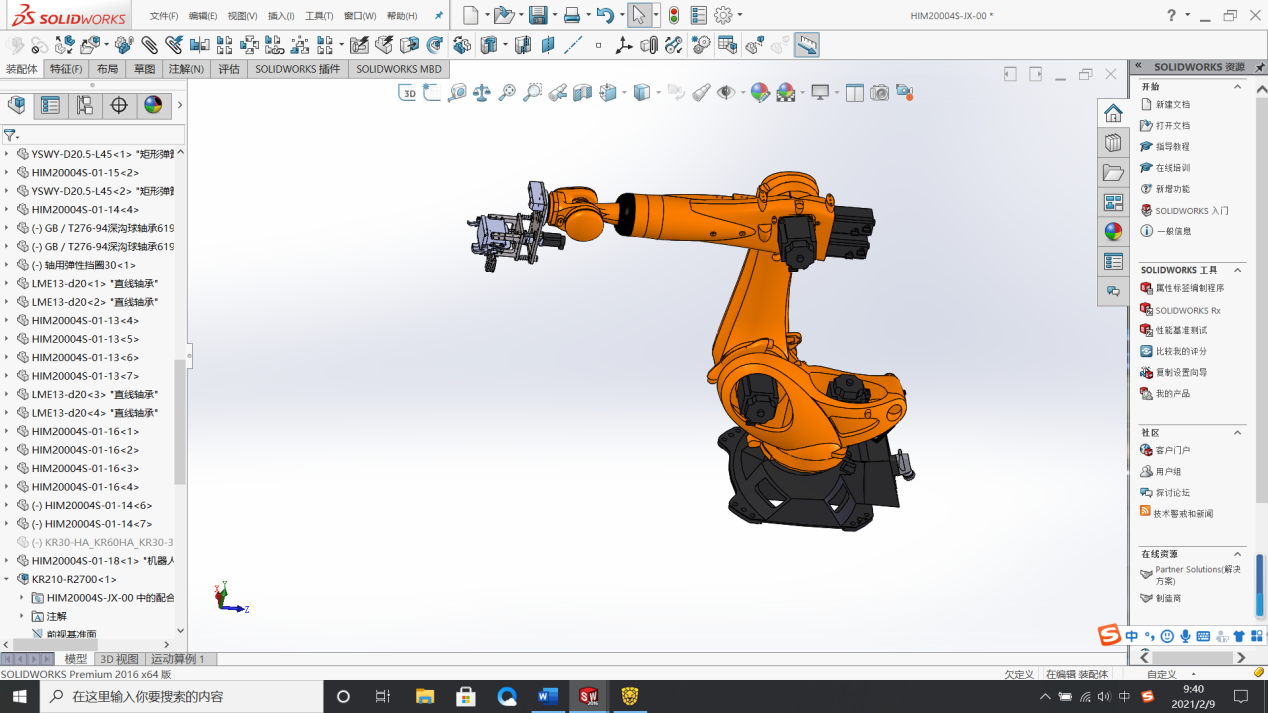
图3机器人自动插拔系统

输送系统
插拔机构由连接法兰、伺服电机、减速机、螺杆拧紧套、安装板、导向柱、弹簧1、压杆、弹簧2、固定夹板、气缸、限位杆等组成。采用伺服电机力矩模式拧紧,可控制拧紧力矩,保证可靠拧紧;导向柱及弹簧1,保证机器人可将插头的公头和母头完全贴合而不会让机器人因硬接触而报警;压杆及弹簧2保证插头拉杆与锁紧螺杆稳定连接。
连接法兰

















固定夹板
限位杆
气 缸
插头拉杆
压 杆
弹簧2
弹簧1
导向柱
减速机
伺服电机
锁紧螺杆
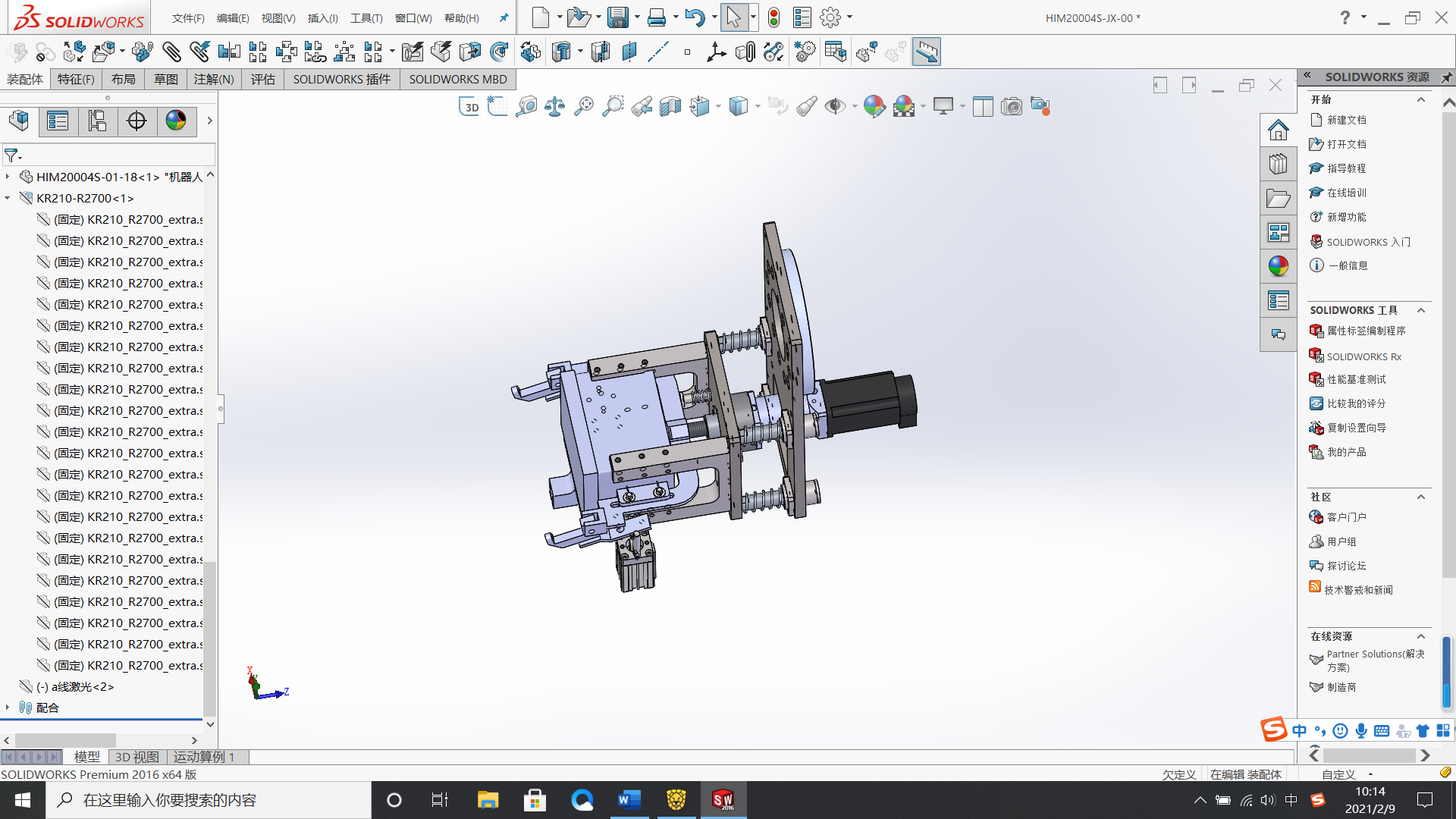
图4插拔机构
图5为机器人系统组成,其中①机器人本体、②连接电缆、③控制系统、④示教器组成。
图5机器人系统组成
本文采用库卡六轴210机器人,工作范围大,负载足够,防护等级高,工作性能可靠,能适应现场环境的要求。机器人参数见表1。
表1机器人参数表
最大工作半径/mm | 2696 |
额定负载/Kg | 210 |
防护等级 | IP65 |
重复定位精度/mm | ±0.06 |
激光视系统采用三维智能轮廓扫描传感器,根据检测的精度、视野要求选择2140系列,参数见图6。 通过扫描插头母头,检测出插头母头的位置坐标,为机器人执行插拔动作做引导。
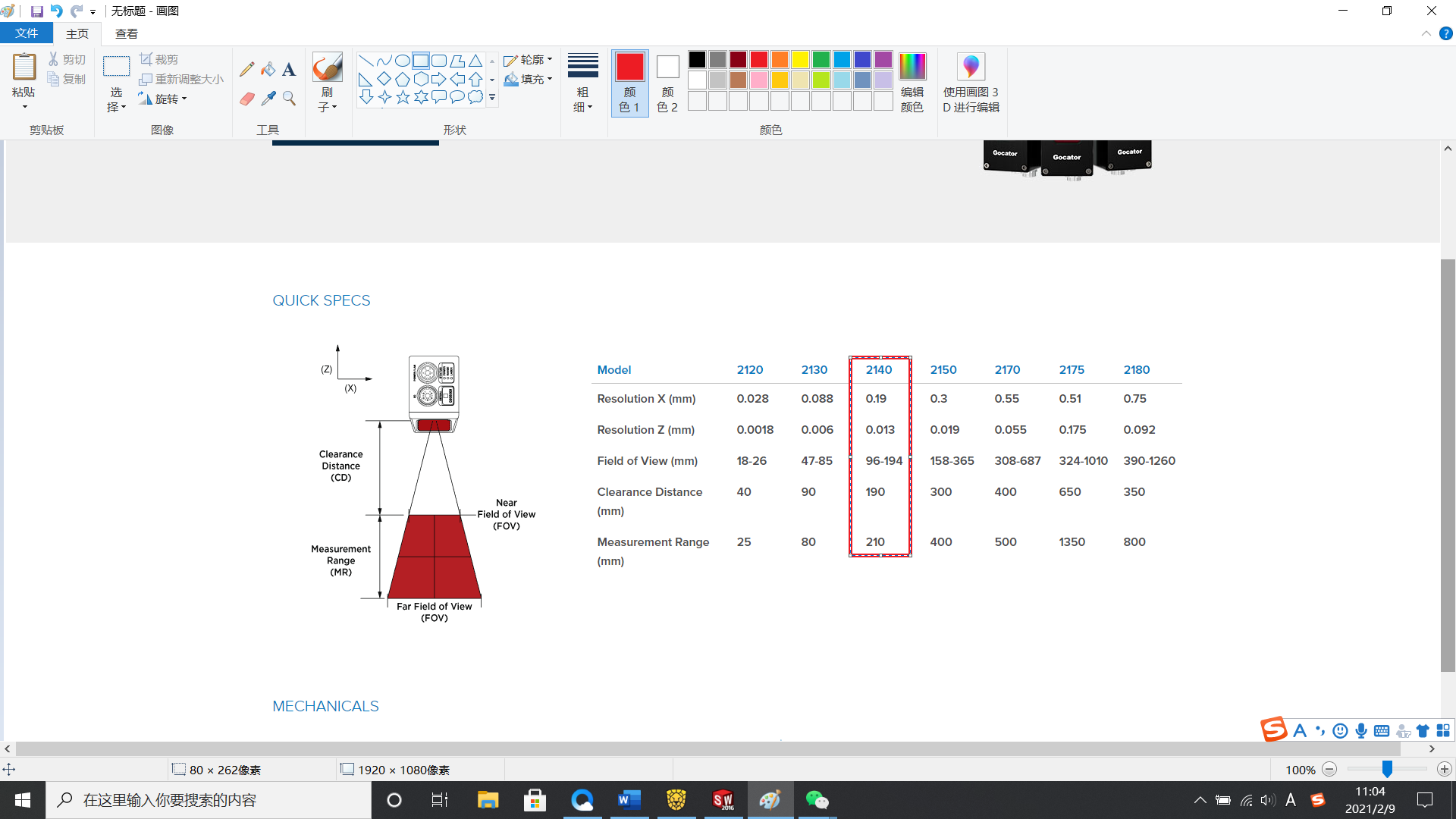
图6激光视觉参数
因钢厂是流程制作,连续不间断生产,目前人工操作是采用四班倒的作业模式,三班工作,一班休息。所以一套鱼类罐机器人插拔系统,实际替代的人数是4人,按照当前的工资标准以及企业负担的五险一金额度,一个工人,企业基本上要付出约15万的资金。一套鱼类罐机器人插拔系统的销售价位约为100万,每年的电费、备品备件及维护费用正常不会超过2万元,企业在两年内就可收回投资成本。机器人系统的正常工作寿命超过10年,若按10年计算,企业的经济效益约为:(15×4-2)×8=464(万元),这还没计算人员工资上涨的因素,实际收益远超464万元。
采用鱼雷罐机器人自动插拔系统,将插拔工人从恶劣的工作环境中解脱出, 避免插拔烫伤风险,减少可能造成的社会矛盾,促进社会的和谐发展。
总结:本鱼雷罐机器人自动插拔系统采用激光与机器人配合,充分发挥两者优势,满足在狭窄空间、多铁鳞、高温环境下的使用需要;每年能为客户提供良好的经济效益,同时将插拔工人从恶劣的工作环境中解脱出,具有良好的社会效益。
参考文献
[1] 成大先, 机械设计手册(第六版), 化工工业出版社.
[2] 现代实用机床设计手册编委会, 现代实用机床设计手册, 机械工业出版社.
[3] 钟玉琢,乔秉新,李树青, 机器人视觉技术, 国防工业出版社.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



