南京大树智能科技科技股份有限公司 江苏 南京 211100
摘 要:针对新型电磁振槽驱动特殊需求,本文提出了一种基于ARM和IPM模块搭建的新型电磁式振槽驱动系统设计方案,通过电子电路和软件控制的方法实现传统机械的结构简化,方案包括硬件构成和软件实现原理,阐述了SPWM波发生器工作原理和振幅PID闭环控制器的工作原理,并给出了关键程序代码 ,该控制器采取模块化设计思路,具有结构简单,成本低的优点,能够充分满足电磁振槽的控制要求,对传统振动输送设备实现升级换代,产生节能降耗的效果.该控制器通过了现场实际验证,其实际节能降耗效果比较明显。
关键词:电磁驱动;IPM模块;ARM;传感器;PWM;PID
Abstract: In response to the special needs of the new electromagnetic vibrating slot drive, this paper proposes a new electromagnetic vibrating slot drive system design scheme based on ARM and IPM modules. The structure of traditional machinery is simplified through the method of electronic circuit and software control. The plan includes The hardware composition and software implementation principle explain the working principle of the SPWM wave generator and the working principle of the amplitude PID closed-loop controller, and give the key program code. The controller adopts a modular design idea and has the advantages of simple structure and low cost. , Can fully meet the control requirements of the electromagnetic vibration tank, upgrade the traditional vibration conveying equipment, and produce energy-saving and consumption-reducing effects. The controller has passed the actual verification on the spot, and its actual energy-saving and consumption-reducing effects are more obvious.
Keywords: electromagnetic drive; IPM module; ARM; sensor; PWM; PID
1.引言
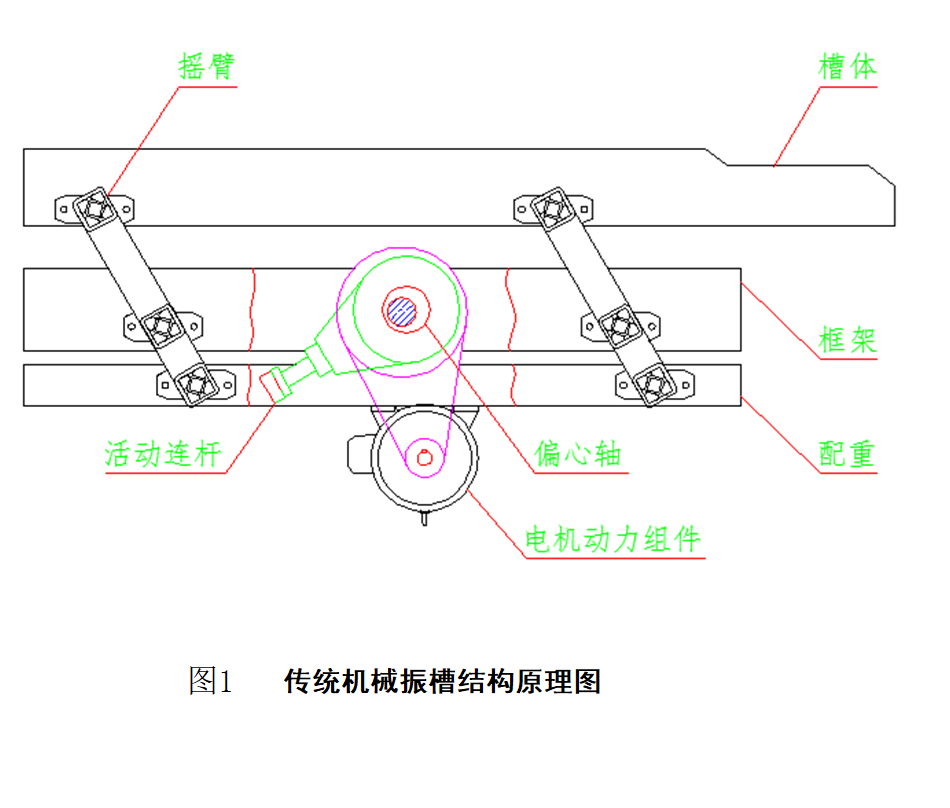
振槽式物料输送机广泛应用于工业生产现场中,例如:传统的一条卷烟工业制丝线或烟叶复烤产线上会用到大大小小几十台振槽输送设备,这类设备一直以来其基本工作原理都是采用电机+偏心轮摇杆机构模式(图1),将电动机旋转动力转换为周期往复运动的振槽体推动力,这种传统方式这种传统的驱动方式属于强迫驱动,动力很大部分都消耗在橡胶阻尼器上,以至于效率低下,阻尼元件磨损严重。如果不加装平衡体,机身将产生不可抵御的剧烈振动,设备将无法使用。为解决这个弊病,现有的设备采用了双曲轴连杆驱动系统,即在一台机器上做了两套完全相同的曲轴连杆系统,一套驱动振槽,完成输送工作,另一套驱动平衡体,起平衡作用。这样,一套系统的对外振动,转变成了两套系统的相互作用,实现了平衡,却造成了双倍的轴承磨损、噪声污染、能源浪费等不良后果。
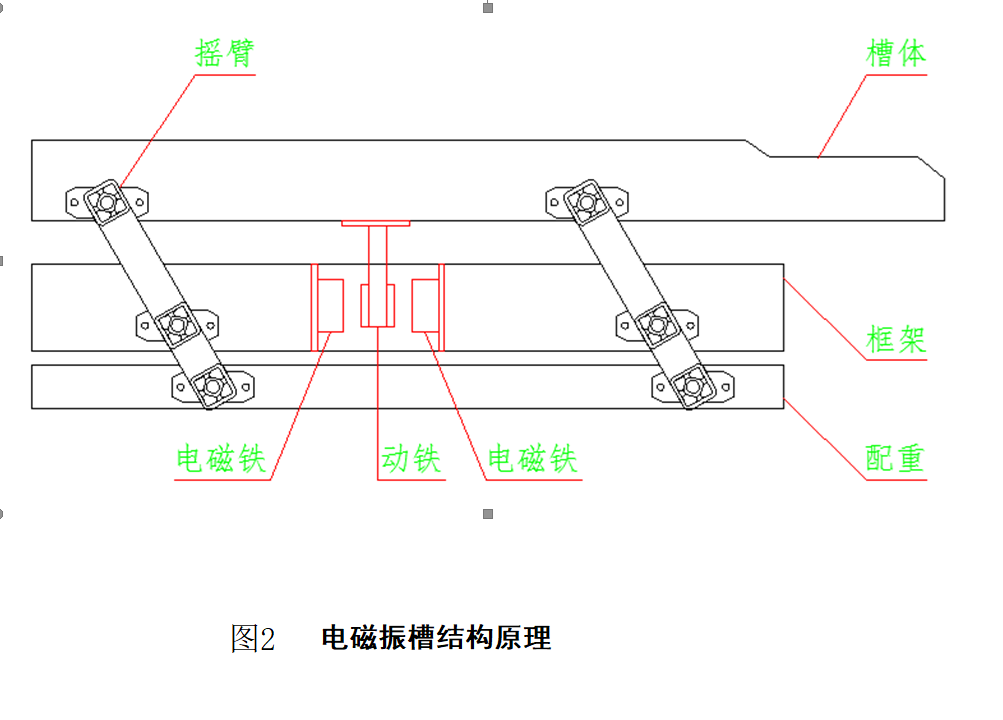
近年来业内诞生了一种新型的机械振槽输送装置(图2),它的特点是动力部分完全取消了电动机、偏心轮等机械连接部件,取而代之的是一套电磁作动装置,通过对电磁线圈进行电流激励产生出电磁力,电磁力直接推动振槽体,从而产生往复变化的振槽驱动力,这种定子线圈产生的电磁力可以以非接触方式传递到振槽体上,使得振槽机械结构大为简化, 这样的驱动方式,实现了传统振槽输送机的原理性变革,由于取消了偏心轮转动连杆机构 ,具有节能和低噪声等一系列优点。
新型电磁振槽由于完全取消了普通三相电动机作为动力,其全新的动力单元-定子线圈在振槽工作时,需要外部电气单元为其提供符合要求的电流激励,对振频振幅进行控制,以保证振槽稳定工作.为此需要专门设计相应的驱动控制电路.
2.驱动系统构成:
驱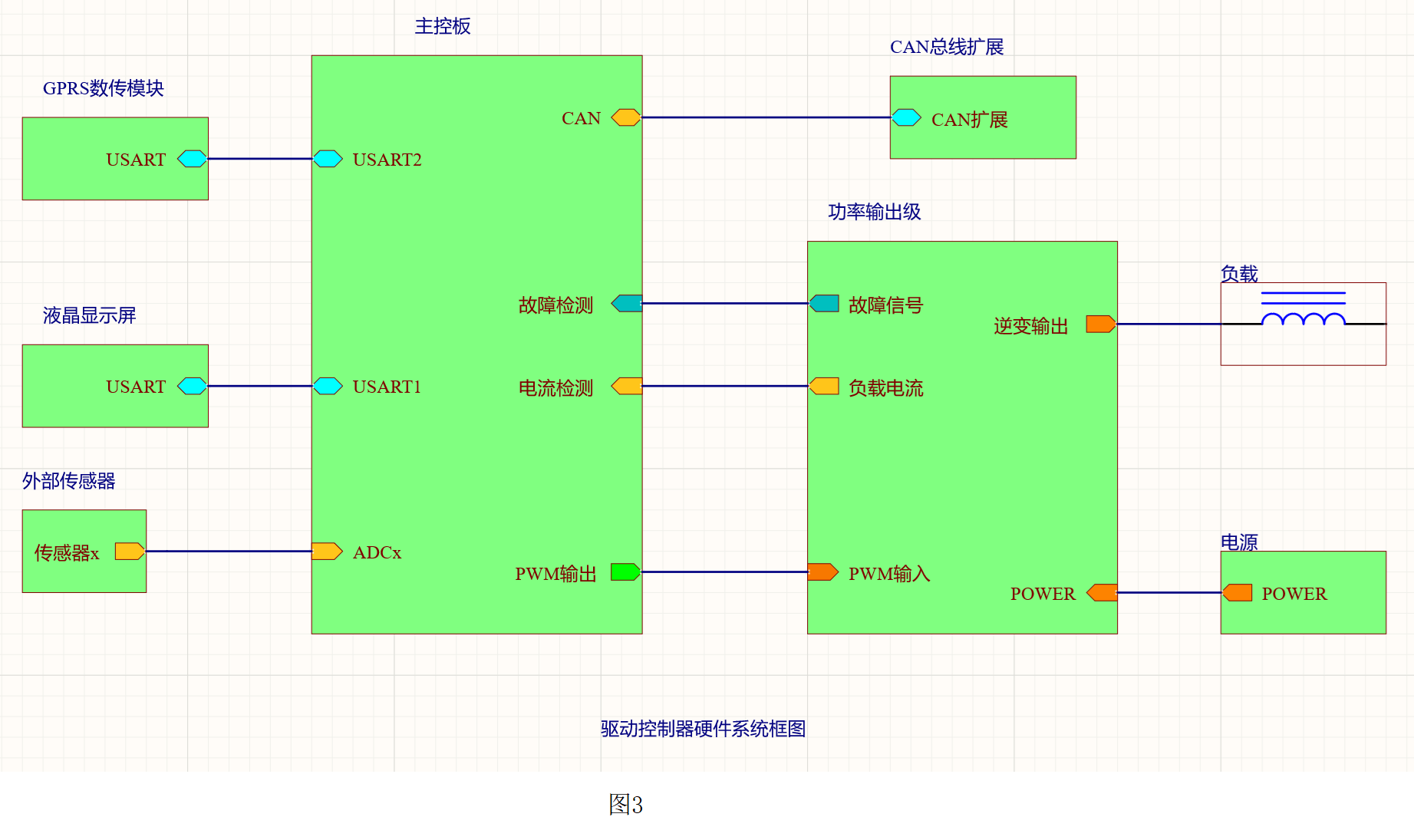 动器系统主要电磁铁、由主控板、功率输出级模块,触摸显示屏、传感器接口、远程数传模块以及电源等几部分构成(图3),主控板功能主要产生参数可调的PWM脉冲波,经光耦隔离后对功率输出级的IPM模块进行驱动,功率输出级电路主要功能是利用来自主控板的PWM脉冲,通过IPM功率模块进行功率放大,最终驱动电磁铁负载线圈,实现将电能转化为机械能,使振槽机械产生所需要的振频和振幅,完成物料振动输送功能.
动器系统主要电磁铁、由主控板、功率输出级模块,触摸显示屏、传感器接口、远程数传模块以及电源等几部分构成(图3),主控板功能主要产生参数可调的PWM脉冲波,经光耦隔离后对功率输出级的IPM模块进行驱动,功率输出级电路主要功能是利用来自主控板的PWM脉冲,通过IPM功率模块进行功率放大,最终驱动电磁铁负载线圈,实现将电能转化为机械能,使振槽机械产生所需要的振频和振幅,完成物料振动输送功能.
3.硬件设计
按照具体振槽工作参数,对驱动系统进行设计,以某型号电磁振槽为例,振槽输送机械参数为: 振动频率为6.5-8.5Hz、振幅12-30毫米,功率输入1200瓦,系统硬件采取模块化设计原则.
1)主控模块:
主控模块采用嵌入式系统来搭建,处理器选择常见的意法半导体公司的STM32系列ARM芯片作为主控处理器,最多可以同时产生30路PWM输出,片上资源完全满足电路需要.为了提高驱动电流的质量,减少有害谐波,采用SPWM方式,也就是采取正弦调制PWM波对电磁铁线圈进行激励.对标准PWM波进行正弦波调制就得到了SPWM波. SPWM产生的方法很多,我们这里采用软件计算结合查正弦表的方法来实现.
STM32系列芯片的其它片上资源,例如ADC可用于外部传感器模拟量进行信号采样,例如PT100温度传感器,位移传感器等. STM32f103系列具有5路UART,我们使用其中两路UART1和UART2,一路用于触摸屏通讯,一路用于扩展数据远传模块.
2)功率模块:
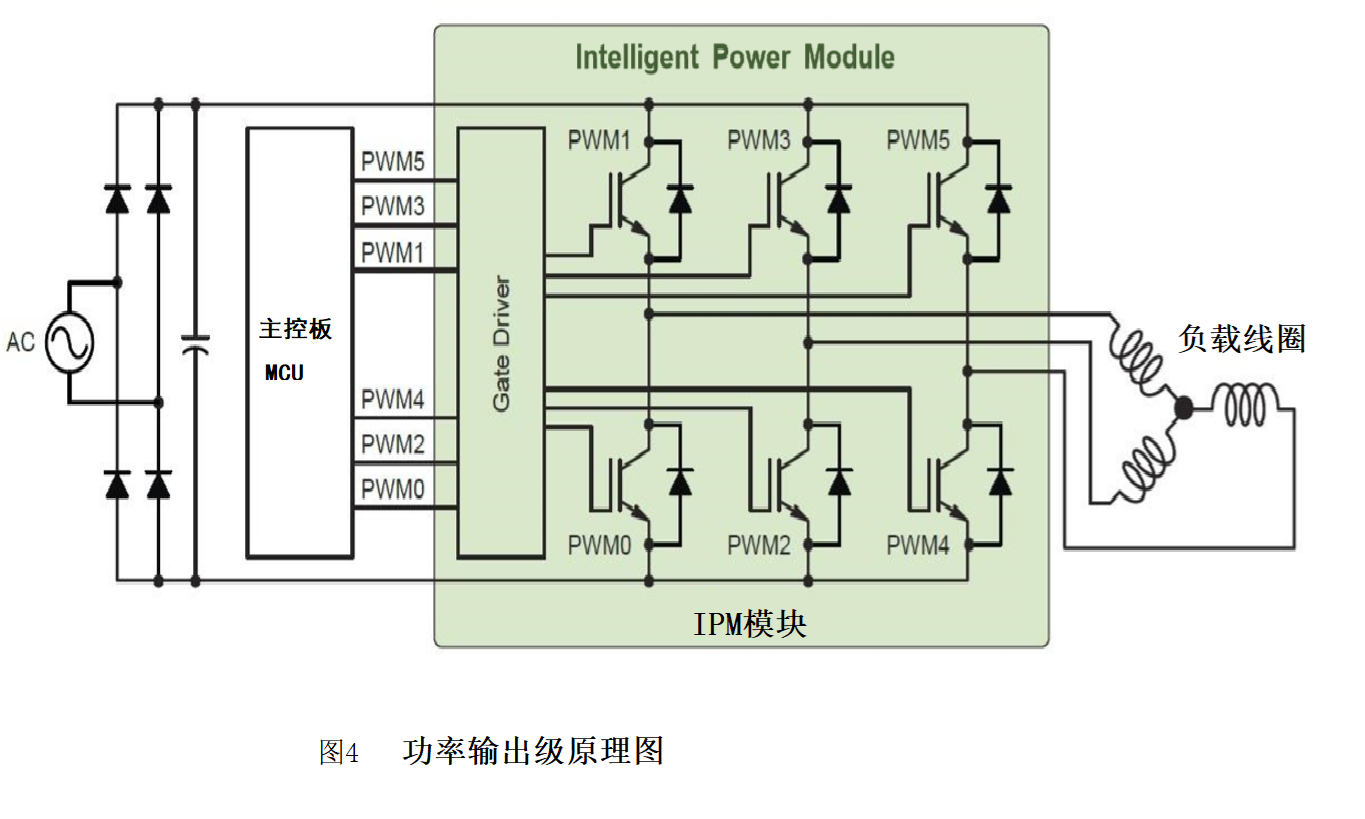
功率输出电路采用600V电压等级的智能功率(IPM)模块作为核心换能器件,将220v进线交流电压整流后的直流电转化为频率和幅值可控的交变电压用于驱动定子线圈(图4),IPM功率模块属于智能功率器件,内含IGBT和驱动保护电路,代表了现代电力电子技 术的发展成果,其功率转换效率高(95%以上),可靠性好,模块内部具有非常完善的保护逻辑,选择IPM模块搭建功率输出级电路能够简化电路,同时极大提升功率电路的安全性和稳定性.
术的发展成果,其功率转换效率高(95%以上),可靠性好,模块内部具有非常完善的保护逻辑,选择IPM模块搭建功率输出级电路能够简化电路,同时极大提升功率电路的安全性和稳定性.
3)人机交互模块:
显示屏选择基于串口通讯的触摸一体屏,实现参数显示和参数设置功能, 该部件属于商品化成熟模组,不需要进行底层开发,只需要按照其通讯协议进行少量代码开发工作,完成相应参数传递,实现人机交互即可.
4)数据远传模块:
数据远传模块用于远程监控设备工作状态,它通过普通UART串口与主控板建立通讯联系(图5),借助数据远程传功能,可以将产线上所有电磁振槽设备数据进行集中在线监控和诊断,对产线设备运行情况进行汇总分析,可以对设备潜在问题进行预警,提高设备现场管理水平,由于数据传输是基于GPRS或者是4G/5G网络,所以其灵活性非常好,容易开展后续的数据开发和利用工作,以满足更高水平的设备管理要求.
4.软件设计
从软件角度,系统需要通过编制软件以实现以下功能(图6):
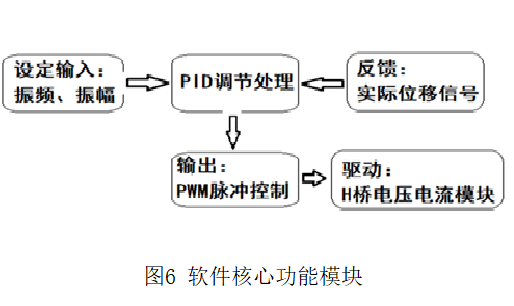
根据实际应用,可以将软件系统划分为几大功能模块:
1)SPWM波产生;
2)振幅闭环控制;
3)人机交互、通讯;
4)故障检测与保护;
4.1 SPWM软件生成方法:
基本原理是利用软件控制PWM波的占空比按正弦规律变化。
用stm32实现步骤可以分为三步:
(1)预定义一个正弦表, 例如我们可以将一个完整周期的正弦波采样n个点,即将一个正弦分割成n份,每个点代表一个幅值,完成对正弦波的离散化数字表达;
(2) 载波发生器,用STM32的内部定时器产生载波,载波频率根据正弦频率计算得出,假设所需正弦波周期为T,把将计数器设置为加减计数模式,同时把计数器周期设为1/T;
(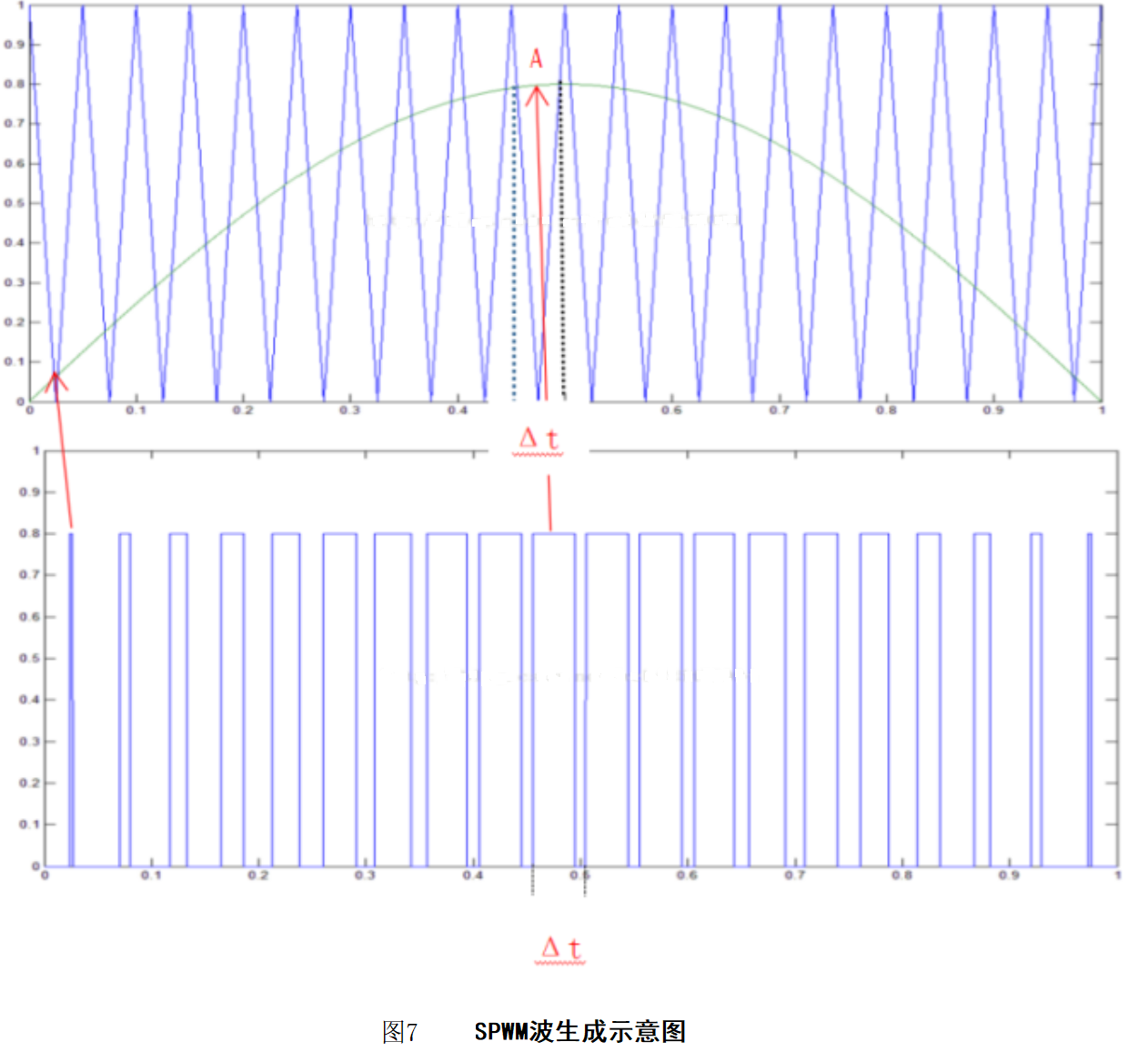 3) 将定时器计数器计数值与正弦表值进行比较,比较之后,从正弦表取出下一个比较值,用于下一个周期进行比较,这样就生成了占空比正弦规律变化的SPWM(图7)。
3) 将定时器计数器计数值与正弦表值进行比较,比较之后,从正弦表取出下一个比较值,用于下一个周期进行比较,这样就生成了占空比正弦规律变化的SPWM(图7)。
下面是选择定时器1作为SPWM波发生器的部分程序代码:
定义正弦离散函数值表:
int const talab[n]=
{具体数据省略…}
这里省略GPIO初始化代码和TM1定时器初始化代码,仅给出中断处理程序代码。
定义三相PWM波相位控制变量:
sine1 = 0; //----A相
sine2 = ø*n/360; //B滞后A相ø度
sine3 = θ*n/360;//C滞后A相θ度
定义正弦调制深度系数变量:
MODUL=0.1~1; //决定正弦输出的幅值大小;
定时器1中断程序代码:
void TIM1_CC_IRQHandler(void)
{
if(sine1>=n) {sine1 = 0; }
if(sine2>=n) {sine2 = 0; }
if(sine3>=n) {sine3 = 0; }
if (TIM_GetITStatus(TIM1, TIM_IT_CC1)!=RESET)
{
TIM_SetCompare1(TIM1,(uint32_t)(talab[sine1])*MODUL);
sine1++;
TIM_ClearITPendingBit(TIM1 , TIM_IT_CC1);
}
if (TIM_GetITStatus(TIM1, TIM_IT_CC2) !=RESET)
{
TIM_SetCompare2(TIM1,((uint32_t)talab[sine2])* MODUL);
sine2++;
TIM_ClearITPendingBit(TIM1 , TIM_IT_CC2);
}
if (TIM_GetITStatus(TIM1, TIM_IT_CC3) !=RESET)
{
TIM_SetCompare3(TIM1,(uint32_t)(talab[sine3])* MODUL);
sine3++;
TIM_ClearITPendingBit(TIM1 , TIM_IT_CC3);
}
}
4.2 振幅闭环自动控制:
由于振槽工作条件的变化会导致振幅不稳定,比如电压波动、物料流量变化导致的负载变化等等,因此需要对振幅大小实施闭环控制,通过采集传感器信号,计算当前实际振幅与期望值之间的差异,对振槽电功率进行调节,完成电磁振槽的振幅闭环控制,控制模型可以采用经典的PID调节器(图8).
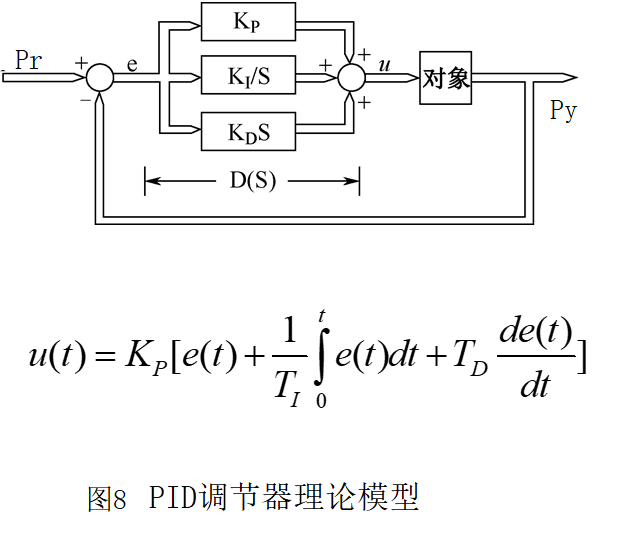
上图中Pr代表振槽振幅的人为设定值,Py为振槽当前实际振幅值, e(t)为振幅误差项且e(t)=Py(t)-Pr, 分别对e(t)求积分和微分,并分别乘以相应系数后进行算术求和,求和结果u(t)作为振槽功率控制的控制量,这里我们可以将它归一化后直接控制SPWM调制度系数MODUL,从而完成整个PID振幅闭环控制,实际实施过程需要将上述控制模型中的连续函数进行离散化处理,PID控制参数也需要在实际运行工况下进行整定(具体代码从略).
4.3人机交互和通讯功能主要基于UART实现,故障检测报警主要通过ADC采集功率模块负载电流来判断系统工作是否正常,为了减少通讯和ADC事务对PWM的影响,ADC和UART通讯事件响应处理均采取DMA方式实现,具体代码从略.
5.经济效益评估
5.1节能:以某烟厂制丝线实施的项目为例,产线上共有62台振槽、振筛,平均功率为3KW,每天工作16小时。采用研制的新型电磁驱动振槽,驱动件之间无接触传动、机械损耗较小,电磁组件的技术参数选型220V、2A即可满足,功率测算约为500W,预计可节电量为(每年按250天计)* 16(每天工作16h)x*2.5KWhx*62 =620000KWh,工业用电按0.8元/KWh计算,每年节约电费为620000x0.8=496000元。
5.2、节省维护成本、降低劳动强度:振槽、振筛采用传统驱动装置,机械件容易磨损失效,维修工作量较大,正常情况下每台套振槽、振筛的年度维修费用将近2万元。应用电磁驱动,使用寿命长,基本上免维护,保守计算节约50%的维护成本费用:2万元(按平均每台2万元计)*62台*0.5=62万元,按每台每年发生0.5次故障测算,还未计人工成本及设备效率损失。
5.3、无形效益:
①、降噪:实测数据显示,传统振槽、振筛输送装置工作时产生的噪音不低于70db。电磁驱动式振槽工作时产生的噪音约50~60dB,有效改善生产现场的环境,减少噪音污染,有利于员工身心健康。
②、可数字化管理:在中控室即可实现生产线的流量控制,而传统的机械振槽是无法实现在线流量控制的。
6.结束语
本文提出了一种针对新型电磁振槽的低成本电子驱动器设计方案,结合新型电磁振槽,能够对传统产业的基础设备进行升级换代,广泛推广应用以后,能够起到很好的节能降耗作用,产生可观的经济效益和社会效益.
参考文献:
[1]RM0008 Reference manual © 2014 STMicroelectronics.
[2]自动控制原理 北航版 作者 程鹏 高等教育出版社.
[3]电磁铁与自动电磁元件 张冠生、陆俭国主编 机械工业出版社.
[4]Intelligent Power Modules Application Manual Mitsubishi Electric.
作者简介:肖荣,男,汉,1965年12月生,工程师,主要从事自动控制和检测方面的研究工作。
6

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



