中国人民解放军第 5311工厂 江苏南京 211100
摘要:随着我国科学技术水平的提高,更加重视大气风场的快速精准测量技术,相干激光雷达是目前测量大气风场速度的重要方式,与其他测量技术相比具有一定的优势。而测速精度又是相干激光雷达系统的一项重要参数,本文着重对相干激光雷达的雷达回波信号处理方法进行分析和研究。鉴于此,本文采用最大似然评估方法进行频谱评估,通过实验证明,相干激光雷达测量系统最大测量误差在0.5m/s以内,平均误差在0.3m/s以内。
关键词:最大似然估计;相干多普勒雷达信号;激光雷达
0引言
随着科学技术水平的不断提升,世界各国越发重视大气风场的快速精准测量技术,该项技术的应用对于社会发展具有重要意义。大气风场准确率的提升可以提高气候预测的准确性,能够准确掌握大气中物质交换的动向,另外准确的大气探测还可以保证人类飞行器的安全起落和发射。与传统的微波雷达相比,激光雷达在实际应用时可以获得更高的灵敏度,同时还具备晴空测风的功能,在未来具有更加广阔的应用前景。在激光雷达中,相干激光雷达利用收发信号之间所产生的多普勒频移差来对大气风场进行测量并获取到准确的风场信息,目前该项技术在低空领域的探测具有一定的技术优势。
1相干激光雷达结构
相干激光雷达主要由激光发射、信号探测、天线以及信号处理等系统构成,其组成结构如图1所示。
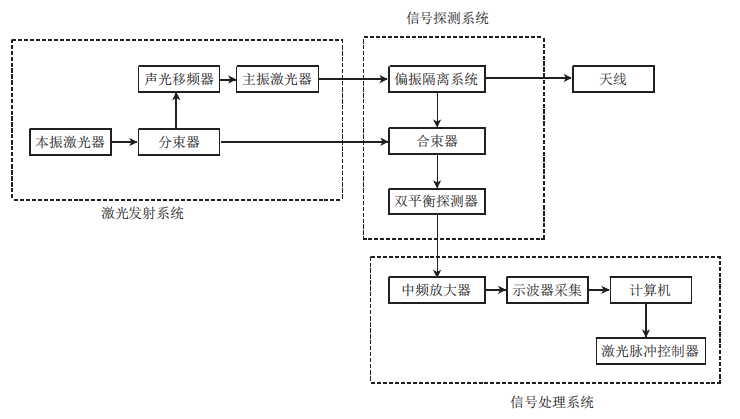
图1 相干激光雷达结构图
其中激光发射系统的主要作用是产生主振激光脉冲,为系统的探测活动提供信号。激光产生器采用3kHz的单频窄线宽激光器,在激光发射后分束器会将激光分为两个部分。一部分作为激光雷达的本振光,另一部分为主振光,经过放大器提高激光束能量,并用于大气风场的测量工作。在雷达系统中主振和本振之间具有一定的频率差,日常的大气探测活动,二者之间的频率差可以达到80MHz。
信号探测系统的主要作用是隔离系统原本的收发信号,在对大气风场中的回波信号进行探测。这种设计原理是因为系统所发出的主振光能量较高,会对光环行器造成损伤,影响系统的正常运行,所以空间光隔离结构可以起到很好的保护作用。本文的空间光隔离结构采用偏振片和波片组成,激光的发射方向与偏振片的透射方向保持一致,使激光束能够全部通过偏振片,当激光束通过偏振片和波片后,将会得到激光的圆偏振状态,并在指定的探测区域发生散射,形成可以被信号探测系统接收的回波信号。合束器的主要作用是将接收到的回波信号和本振光进行混频,获取到包含探测区域风场信息的中频信号。
信号处理系统的主要作用是对合束器生成的中频信号进行采集和处理,对探测区域的风场信息进行真实还原,中频信号要经过系统放大器进一步放大,并使用示波器完成信号的采集工作。本文在实验中采用安捷伦示波器,可以稳定的获取到10GHz的信号数据。在对信号数据进行处理时,本文采用Simulink仿真方式,根据信号的具体特征选择最佳的处理方法,可以进一步的提高系统探测的精度。
2雷达信号处理方法
对雷达信号处理的目的是为了从回波信号中获取到探测区域的多普勒信息,通过对多普勒信息的计算就可以获得对应区域的大气风场风速。其具体的处理流程如图2所示。
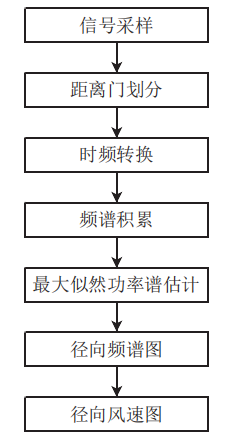
图2雷达信号处理流程
从雷达回波信号中获取到所需的多普勒数据信息后,就可以根据这些信息反推风场风速,但是不同的探测深度,其所包含的风场信息不同,为了准确的获取到探测区域的风场变化情况,在进行雷达信号处理时要进行以下操作:首先对获取到的回波信息根据距离特征进行划分,而回波距离的远近主要由激光脉冲的宽度决定,选择多个测量区域,对同一距离回波信号的频率进行更换,经过多次试验就可以获取到回波信号的离散情况,即离散频谱,最后应用非相干累积方法对获取到的信号数据信息进行非相干积累后,利用频谱估计算法就可以求解出相对应的风速。频谱估计的方式和方法有很多,为了保证最后所计算出的多普勒数据信息准确性最高。本文选择最大似然的功率频谱估计方法,也就是通过多个组合测量值,运用联合概率密度对信号数据进行处理得到待估函数,在求解过程中默认的功率谱概率密度为高斯分布,从频谱数据中选取出现概率最大的观测值作为参考值,最后利用多普勒频移公式来对测量区域的风速进行求解,最后求得所需要的风速信息。
3信号获取与处理
系统的测量精度会受到频率测量精度的影响,测量精度也是判别信号处理方法是否适合的重要参数之一,为了验证最大似然评估法是否适合,本文将通过以下实验对其进行证明。本文采用螺旋电机安装对称的叶片结构,如图3所示,螺旋电机所产生的风场能够为雷达提供稳定的探测目标,为了保证实验在可控的范围之内,本文将探测点位置的速度设置在23.12m/s,风速递增或递减的梯度为1.85m/s。
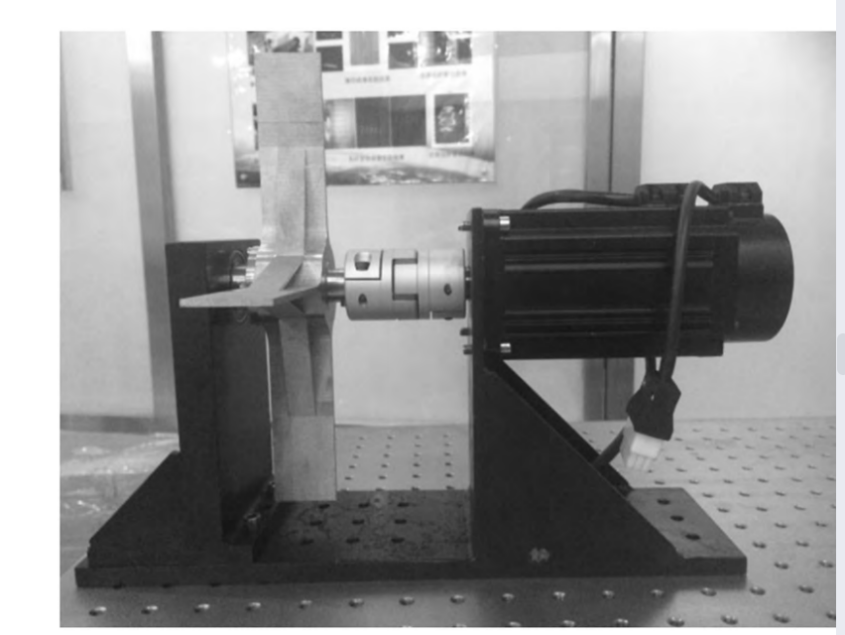
图3速度检测装置
雷达回波信号不仅包含散射信号还包含镜面反射信号以及白噪声,被探测目标的散射截面通常较小,接收装置所获取到的散射信号通常较弱,对最终的测量结果影响较小。本文实验环境选择在室内进行,信号发射装置所发射出的脉冲激光波长为1.55μm,脉冲激光的宽度为300ns,频率为10kHz。由于激光装置在发射之初系统内部的信号功率较高,会对回波信号的探测结果产生影响,因此就需要在光路中放置反射镜,从而使激光路径增长,可以与镜头回波在时间上进行明显区分。实验装置的安装位置如图4所示。
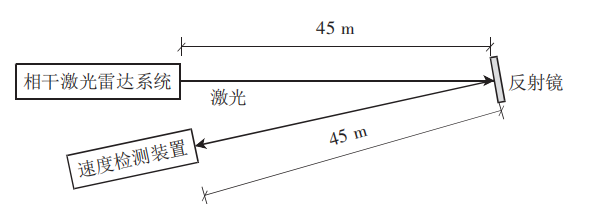
图4实验装置结构图
本文采用双平衡探测器对激光回波信号进行探测,从而获取到多组离散雷达回波信号,随机选取一组雷达信号进行分析,并将其分为三段,a段为镜头回波信号;b段为反射镜回波信号;c段为电机回波信号,如图5所示。
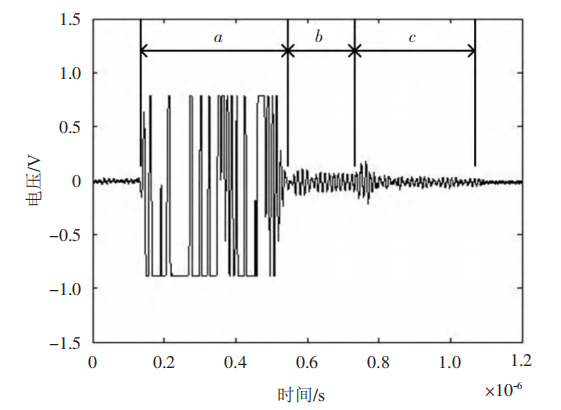
图5雷达回波信号
为了对雷达信号进行距离门划分,系统采用宽度为300ns的激光脉冲,因此所对应的距离分辨率为45m。选取c段的距离门进行快速傅里叶变换就可以获取到傅里叶频谱,如图6所示,但由于进行转换的信号时长有限,最终所能获取到的频谱数据为离散傅里叶频谱,信号间隔仍然为300ns,对应频率为3.3MHz。本文通过Matlab对频谱资源进行高斯拟合,而拟合后的中心位置就实现了对频谱数据的还原,最后利用多普勒效应公式,就可以准确的计算出该位置风速的评估值。
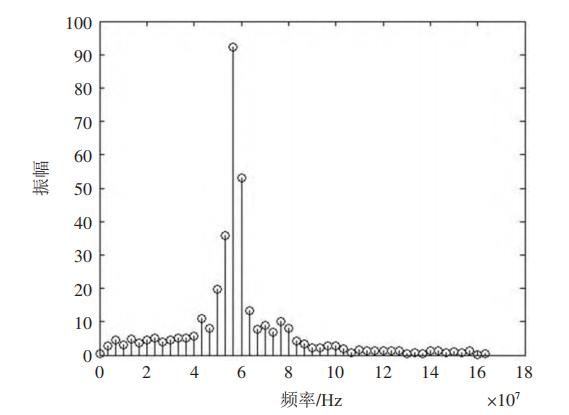
图6信号频谱图
本文通过对多组不同运动速度的目标进行实验,并采用最大似然评估法对其信号进行频谱估计,从而计算出运动目标的测量值。然后通过对频谱进行高斯拟合来求得回波信号频率测量值,最后根据计算所得的频率计算速度,将雷达所测得的测速结果与电机叶片实际转速进行对比。通过对多组实验目标进行对比发现,当拟合的相关系数较高时,雷达所测量的误差就越小。将实际速度与测量速度进行直线拟合,如图7所示。因此,当直线斜率为0.9986,可决系数为0.9997时,具有较好的线性和测量精度。
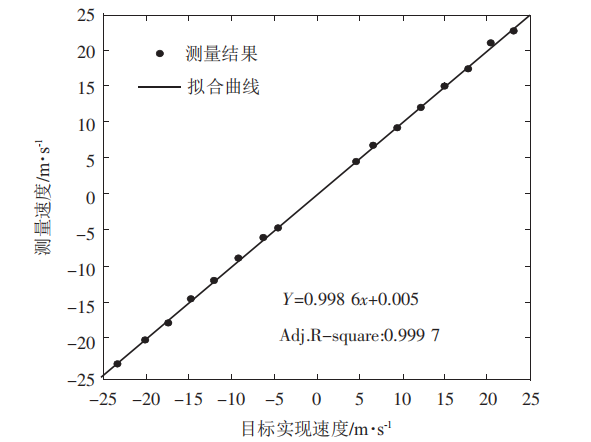
图7真实速度与测量速度拟合曲线
4结语
目前在相干激光雷达领域,最大似然离散谱估计是一种较为有效的风速评估方法,本文通过编程与仿真的方式,对雷达频谱信号进行了最大似然评估,通过相关实验证明最终的测量结果在较为理想的范围之内,并对测量结果与实际速度进行直线拟合,并且得到较为良好的线性,由此证明了最大似然离散谱估计计算方法的有效性。
参考文献
[1]刘燕平. 联合时频分析在相干测风激光雷达中的应用[D]. 中国科学技术大学, 2018.
[2]郭力仁. 目标微动特征的激光探测信号处理与参数估计方法研究[D]. 国防科学技术大学.
[3]胡进峰, 薛长飘, 李会勇,等. 基于最大似然法的天波超视距雷达相位解污染算法[J]. 电子与信息学报, 2016, 38(12):8.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



