中国汽车工程研究院股份有限公司智能中心/中汽院智能网联科技有限公司 重庆市 401122
摘要:汽车的自动驾驶是指利用互联网解放人们的双手,在汽车行驶过程中不用人为操控,而是选定路线之后由人工智能进行操作。利用人工智能实现汽车自动驾驶是对传统驾驶模式的改进,可以减少人为因素的干涉,在一定程度上提升交通的安全性。人工智能技术发展的前景非常广阔,所以各个企业也纷纷投入到汽车自动驾驶的研究中。本文主要研究了自动驾驶智能系统相关测试研究,仅供参考。
关键词:自动驾驶;智能化系统;研究测试
引言
自动驾驶汽车相比传统汽车,增加了更多传感器、执行器、控制运算器等复杂元器件。由系统通过感应外界环境并与外界环境交互进行驾驶操作,需要进行更严格更长时间的测试验证才能确保其基本安全。
一、并行加速系统测试
1、测试架构
将加速测试方法与并行计算方式相结合,提出由顶层管理层、中层协调层、底层执行层构成的3层并行加速测试架构,在充分利用多计算单元优势进行并行计算的前提下,通过危险场景强化生成进一步加速测试进程。加速测试架构如图1所示,每层包含若干个计算单元。在试验过程中,首先将逻辑参数空间的全集空间按照一定的规律划分为若干个仅包含参数空间不同部分内容的子集空间;分配不同计算单元的角色,整个全集空间仅包含一个顶层管理单元,每个子集空间有其各自的中层协调单元,其余均为底层执行单元;将底层执行单元平均分配到不同的中层协调单元下属的子集空间中进行参数试验;随着试验的进行,顶层管理单元协调底层执行层中的不同底层执行单元在不同子集空间之间进行流动,将量化指标值较差的子集空间中的低效单元转移到量化指标值较好的子集空间;中层协调单元计算下属子集空间内的底层执行单元执行试验的具体参数,并标记下属子集空间内的低效单元;底层执行层由多个并行的计算单元构成,它们可各自独立地接收中层协调层发送来的试验参数进行试验。相比现有方法,由于将逻辑场景参数空间分区,可以在宏观层级保障测试的完备性,更大几率发现所有危险场景所在区域;通过子集空间之间和子集空间内部的底层执行单元调度,可以在微观层级提高危险场景的生成概率,提升测试效率。
2、模块构建
以顶层模块构建为例进行系统测试研究:子集空间之间的底层执行单元流动分为流入和流出两部分。在每轮迭代结束后,对于子集空间平均量化指标值低于总体平均量化指标值且不存在活跃危险场景的子集空间,顶层管理单元会调度该子集空间内的低效单元以一定的概率离开当前空间并迁至其他流入空间。流失子集空间内的低效单元离开当前空间的概率pi为
Pi=![]()
式中:pi为第i个子集空间中低效单元离开该空间的概率;gj为第j次迭代所有底层执行单元量化指标的平均值;gij为第j次迭代第i个子集空间中的平均量化指标值;j为当前迭代次数;T为调节参数,代表顶层执行者的权威程度,该值越大,顶层管理单元的权威程度越大,次级管理者越容易听从顶层管理单元的调配,该值一般大于10;K为预先设计的最大迭代次数;n为顶层管理单元期望分配给每个子集空间的底层执行单元数量,该值一般大于初始分配的底层执行单元数量,代表顶层管理单元期望每个子集空间都有足够多的底层执行单元;nij为第i个子集空间在第j轮迭代时的底层执行单元数量;nijmax为第i个子集空间在第j轮迭代时剩余的活跃极值点数量。当前空间量化指标值越差、底层执行单元数量越多、迭代次数越大,则该低效单元越易离开。通过顶层管理模块的运行,底层执行单元会逐步向具有较高探索价值的子集空间富集,进一步强化高危险子集空间内危险场景的生成,提高测试效率。
二、避障系统测试
1、测试架构
智能汽车使用舵机和超声波传感器为避障模块,在Arduino的控制下收集汽车的相关路况信息,并将记录的信息送回Arduino进行处理,Arduino可以通过调用程序来控制汽车采取相应的行动,实现避障功能。此项目设计分为4个主要功能模块:电源、电机驱动、舵机以及避障,各模块共同实现智能汽车的驾驶、障碍物检测和避障功能电源作为整个硬件链的一个重要部分,提供稳定工作电压以保障系统电路的正常运作。本项目的电源电压范围为6.5-9V,根据锂离子电池的特性,选用2块3.7V的锂离子电池和1个电池盒,为系统运行提供7.4V的稳定电压。步进电机是通过脉冲移动的,脉冲信号使电机在指定方向上旋转固定的角度。改变步进电机的脉冲数使其角位移发生相应变化,改变脉冲频率调整旋转速度。驱动电机的选择决定系统电路能否正常运行。本项目依据智能汽车的设计条件,选择了2台L293D电机,可以提供800mAmA的驱动电流和4.5-36V的宽电源电压。内目前,智能驾驶辅助系统在汽车上的应用逐渐广泛,国内大部分车企已经开展L3-L4级别的辅助驾驶系统研究,其中传感器是辅助驾驶系统中的重要组成。市场上车载传感器大致分为3类:超声波传感器、毫米波雷达、激光雷达。从经济性方向考虑,超声波传感器成为当前的首选设备。在本文中,超声波传感器与舵机配合,接收障碍物信号。当传感器检测到障碍物时,传感器发出的波形信号受到反射,根据反射信号的接受时间差异Arduino处理器芯片,运行相应的程序,根据超声波的反射效果和0度-180度的伺服旋转来采取应对措施,达到避开障碍物的目的。
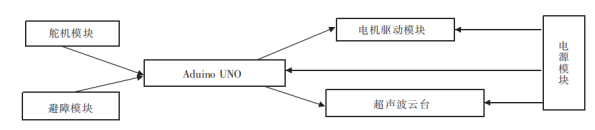
图1 系统框架图
2、实验建模
小车的避障效果以在实验环境中借助简单的物体作为人体模型参照来检验。实验场景布置由模拟小车、人体模型等构成。小车以5KM/h的速度直行,驶向小人模型。小车在距行人模型1m处开始减速制动,在距小人0.85m处停止,实验设计如图1所示。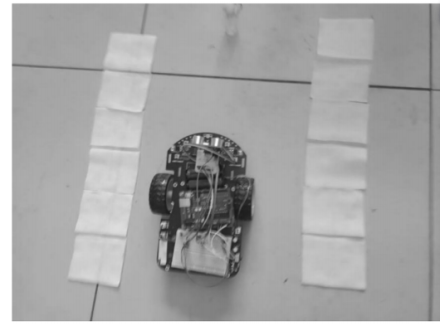
图1避障实验图
结语
当今时代,各类科学技术的飞速发展推动了各项产业向智能化与自动化发展,汽车产业也不例外,已融入智能驾驶、自动避障等技术实现自动驾驶。自动驾驶汽车的出现可从根本上预防因不规范驾驶或违规驾驶所导致的道路安全事故,以此为人们的生活带来方便。
在现实世界中,高度复杂的驾驶环境使得试验的测试用例数量变得异常庞大,因此,如何设计合适的试验方法,用尽可能少的测试用例获得更多的测试信息,是一个非常重要的研究课题。本文主要研究了自动驾驶智能系统相关测试,以并行加速系统测试、避障系统测试为例进行研究,仅供参考。
参考文献
[1]朱冰,张培兴,赵健,陈虹,徐志刚,赵祥模,邓伟文. 基于场景的自动驾驶汽车虚拟测试研究进展[J]. 中国公路学报,2019,32(06):1-19.
[2]赵祥模,承靖钧,徐志刚,王文威,王润民,王冠群,朱宇,汪贵平,周豫,陈南峰. 基于整车在环仿真的自动驾驶汽车室内快速测试平台[J]. 中国公路学报,2019,32(06):124-136.
[3]许闲. 自动驾驶汽车与汽车保险:市场挑战、重构与应对[J]. 湖南社会科学,2019(05):86-96.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



