中石化石油工程地球物理有限公司北斗运营服务中心 江苏南京 210000
摘要:为进一步提高卫星导航系统的精度和可靠性,必须使其具有更多的空间星座和更多的可视化卫星。因此,多系统多星座导航与定位技术是目前全球卫星导航与定位系统的一个主要研究方向。本文在深入分析了 GPS与北斗系统的基础上,结合两种系统的信号处理算法,提出了一种基于 FPGA+ ARM+ RF两种 RF模块的 GNSS平台,以完成最后的定位结果。实验结果证明,该算法可以达到较高的导航和定位精度。
关键词:北斗系统;GPS系统;定位结果
随着科学技术的进步,卫星导航与定位技术得到了广泛的应用。卫星导航与定位系统,是指以卫星作为参照来源的一种无线电导航系统。要实现精确、稳定的导航与定位,就必须对各种导航和定位系统进行分析,并将其进行融合,从而弥补现有的不足。为了达到以上功能,需要将 GPS和北斗两种主要系统的信息进行接收,并将 GPS和北斗两个信道的数据结合起来,以获得相应的位置和其他信息。
1系统设计方案
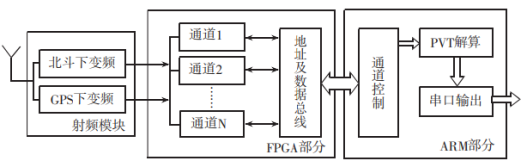
双系统信息联合处理系统总体框图如图1所示,可划分为射频模块、跟踪通道、通道控制、PVT解算、串口输出等功能模块。
图1双系统信号处理框图
RF模块将接收到的卫星信号下转换为中频,其中,北斗B1频点载波频率为1561.098 MHz,GPSL1频点载波为1575.42 MHz,两者之间的距离为14.322 MHz,这两个频点之间的差距是14.322 MHz,但在下行转换器的频点差别会导致信号在频段之外被抑制,所以有必要将 RF信号分成两个向下转换到中频。
2基带信号处理
2.1中频载波剥离
为了去除中频信号的载波成分,必须先通过本地载波 NCO产生与中频信号同频、同相等的本地拷贝载波,然后用混频器将二者相加,从而分离出中频载波。由于该输入信号是一个2位的偏置二进制信号,该幅度位表示该偏置;符号比特中的1表示符号是负数,0表示正数。
本地复制的载波也采用此格式,以符号比特和幅值比特表示载波。载波 NCO输出一个阶梯型的周期信号,再用正弦余弦函数查找表将载波 NCO中累积器输出的高3比特变换为D-正弦信号和D-余弦信号。
NCO的工作流程可以被看作是 N比特的累加器,通过输入时钟 fclk的触发而连续地按步进 M进行累加,这就相当于对时钟信号 fclk执行2 N次分频,并且通过对每一累积的数字 M进行控制来获得 M次乘频,从而获得具有 fc等于:
fc=(M·fclk)/2N(1)
公式(1)显示,只要输入适当的 M数值,就能近似或相等,从而使它能用查表法输出数字正弦和数字余弦信号。因此,在设计时,先用 N比特的累加器对时钟频率进行2 N分频,而每一次累积的数字 M被外部电路写成 M,从而达到 M倍频。
2.2测距码
相关接收采用了图4中所示的伪随机序列的自相关特征,τ表示两个序列的相位偏移幅度,ρ表示序列长度, R (τ)为相关函数的输出值,也就是说,在两个符号之间的偏差在一个符号范围内时,其值会迅速增加,而在偏离超过一个符号时,该相关函数的输出值会非常小。为使本机测距码的相位与卫星测距码实时对齐,该测距码产生一个相位差1/2个码片的测距码,即超前码 E、即时码 P、延迟码 L。先进码的速度要快于即时码1/2个符号,而延迟码则是延迟1/2个符号。
G2移位寄存器的两分接头的数值范围为[0、10],可以在添加1比特的系统选择比特的情况下使用2个4位二进制数来表示,在信道的初始化时,由微处理器向测距码发生器提供9比特的配置参数 PRN [8:0],这里 PRN〔8〕是系统识别位,在0时代表信道处理北斗数字基带信号,并赋初值01010101010,G2序列的输出分接头编号是 PRN [7:4]和 PRN [3:0];G1、G2处理器在数值为1时对 GPS数字基带信号进行处理,G1和G2处理器被配置,并分配1111111111,G2序列的输出分接头编号是 PRN [7:4]和 PRN [3:0]。
2.3总线控制
FPGA和 ARM通过STM32的 FSMC总线协议进行通讯,并通过地址 A、片选、读使能、写使能(NWE)等信号来进行数据传输。
(1)片选信号NCS
在此信号为高的情况下,相关器没有向外界传输数据,只有外部中断的持续输出。在需要读取和写入相关器的时候,应该将这个信号提前调低。
(2)地址选择
对相关器的不同模块和不同类型的操作是通过地址A来区分的,在读写使能未触发时先设置好地址A,在读写过程中应保持A不变。
(3)读时序(如图2所示)

在读取相关器信息时刻,NOE由高电平向低电平跳变,当FPGA检测到该跳变时,将对应数据送入输入输出端口。
图2总线读数据时序
(4)写时序(如图3所示)
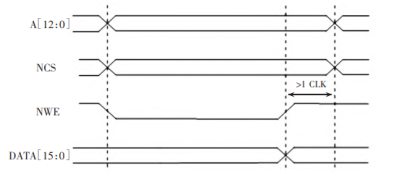
在将数据写到相关器的瞬间, NWE从高电平跃迁到低电平,并且在恢复到高电平的一段期间内,并且在 FPGA探测到上升边缘回到高电平时,从输入/输出端写到相应的寄存器。
图3总线写数据时序
3通道控制
通道控制功能由微处理器完成,与数字基带信号处理器共同实现信号捕获、同步、跟踪和电文解码功能,其处理流程如图4所示。
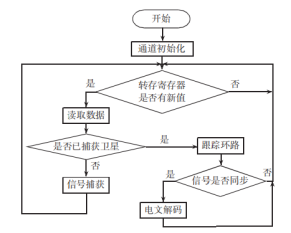
图4通道控制程序流程图
在接收端上电源后,首先由单片机对各个信道进行初始的改变,其中包括载波 NCO设定、测距码 NCO设定、测距码分选等。接着,当转换器有了一个新的数值时,微处理器会读出各个积分器的数据,执行对卫星的捕捉。在确定了接收到的卫星之后,信道就会进入追踪阶段,通过查找位的边沿和数据帧头来完成信号帧的同步,然后再根据不同的系统对其进行译码,从而获得导航消息。
4PVT解算
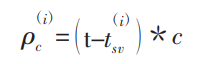
要实现PVT解算,首先,接收机记录各颗卫星导航电文中的星历信息,随后在同一个TIC脉冲下记录各通道的即时状态;然后接收机计算出TIC时刻下接收到的信号播发的卫星时间tsv,接收机利用tsv计算出卫星的三维坐标;随后利用式(2)求得接收机与第i颗卫星之间的伪距ρc(i),其中t为系统时,光速c=299792458m/s,此时因注意的是若当前卫星是北斗卫星,采用北斗系统时计算伪距,若是GPS卫星则需采用GPS系统时计算伪距。
(2)
在有效定位点已存在或已设定初始坐标的情况下,接收器基于卫星和接收器之间的相对位置校正伪距和卫星 tsv时间三维坐标,在接收系统时间 t时间的 ECEF坐标系中的坐标值。到目前为止,已得到了观察方程所需要的参量,并着手建立该方程。
5性能测试
在 PVT解算试验中,为了确保各测试的公平性,在同一个测试环境中,使用同一个硬件平台,对单系统、单系统、双系统联合进行了测试。在试验中,以1 Hz的频率进行定位,每组30分钟进行采样,共计1800个采样点。在三种不同的试验情况下,分别记录了 PDOP、水平位置精度系数和高度精度系数(VDOP)。
表1三种测试条件下的精度因子θ

星座分布及可供选择的卫星数目对定位精度有较大的影响,而北斗系统作为一个正在建设中的系统,其空间星座正逐渐趋于完善。通过与 GPS、北斗、 GPS等技术相结合,优化了空间星座的布局,提高了可见卫星数目,增加了观测方程,选择了更为合理的选择方案,可以有效地提高了接收器的定位精度和可靠性。
6结论
本文首先对系统的硬件平台进行了设计,给出了 FPGA系统电路、 ARM系统电路和 RF电路的层次结构,并对单、单、北斗三种系统进行了性能检测。该方案实施后,将会增加系统可视化的卫星数目,从而可以更好地选择星座,从而提高观测方程式的可信度。另外,该双星系统还利用 GPS的成熟空间星座来弥补北斗系统在发展中存在的一些不足,从而提高了 GPS的定位精度。
参考文献:
[1]王祯,王尔申,代双亮,等.GPSC/A码发生器的仿真研究与FPGA设计[J].电子设计工程,2013,21(24):01-03.
[2]王迪,郝士琦,朱斌,等.“北斗”2代B1I信号导航电文分析[J].航天电子对抗,2013,29(06):30-32.
[3]徐菁.“北斗”卫星导航系统空间信号接口控制文件解读[J].国际太空,2013(04):26-32.
[4]陈南.卫星导航系统导航电文结构的性能评估[J].武汉大学学报(信息科学版),2008,33(05):512-515.
[5]夏长峰,刘党辉,金东阳,等.北斗系统信号NH码处理方法研究[J].导航定位学报,2014,02(03):25-29.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



