桂林市晶瑞传感技术有限公司 广西桂林 541000
摘要:无驱关节臂式坐标测量机具有结构简单、体积小、测量范围大等优势。但应用在线测量时,需要专业人员操作执行,效率低成本高。将多关节机器人技术与关节臂式坐标测量机相结合,增加自驱系统,可以在保留关节臂式坐标测量机优点的同时,解放人力节省成本,也消除人工操作的不确定性减少操作误差。
关键字:
自驱动关节臂坐标测量机,误差模型,DH参数法、容栅编码器,无框BLDC电机, 3D测头
随着我国科学技术的进步以及经济的迅速发展,高新装备制造业产品占据世界高端市场份额越来越大,对于测量技术应用要求越来越高,测量精度,使用便捷性,测量效率等都提出相当高的要求。关节臂坐标测量机因测量精度高,环境要求低,使用灵活等特性得到广泛应用,但对于批次产品的重复测量还需要人工操作,无法自动化。为提高测量效率,解决高效重复测量需求,自驱式关节臂坐标测量机的研发、产品化,因其应用方便、高效精确的特性,应用广泛,市场潜力大。
1、现有技术基础:
目前无驱动关节臂坐标测量机作为新型坐标测量系统,相关技术趋于成熟,相关标准已经发布。相关技术包括采用经典Denavit-Hartenberg(DH)参数法建立测量机理想模型,设定关节参数,利用数值法求解理论测量空间。关节综合误差建模法分析测量误差,采用关节臂式参数标定法对系统进行标定修正,测量结果精度高,使用灵活。但操作以人工拖拽的方式进行测量,对于操作人员操作方法有较高要求。产品轻便,测量半径≥2.8m米,重复精度≤0.030mm,空间长度测量示值误差在(-0.040mm~+0.040mm)。
关节机器人同样也采用DH算法与相关误差理论分析修正。驱动及控制系统与空间位置算法结合,以准确执行相关指令进行工作。但工作半径相对较小,产品粗重。需要专业安装调试校准等过程才能使用。
2、实现关键技术:
基于关节臂坐标测量机工作目标设定,要求系统具有准、稳、活的特性。
1)特性“准”,指测量位置及结果的准确性。自动测量系统能根据预先指定的测量点位置,对目标进行测量。通过逆运动学求解不同测量姿态时的旋转关节角度,由于产品本身存在相关误差,测量过程须对误差进行实测位置运动补偿。采用接触式测量,人工测量过程,由人接受触碰反馈进行精确控制,多采用固定式测头进行测量。自驱动测量由于为预设运动,行进会有补偿量,只能选择活动式测头进行测量,选用3D测量头技术对于测量位置的不确定性可以得到良好应用,也可以一定程度防止测头损坏。
导入3D测量头技术后,还可以降低运动精度要求。但对于测量精度,仍需采用DH参数法、关节综合误差建模法,通过标定方式对修正关节模组内部构件的转角误差,关节末端负载引起的关节扭转变形误差,根据关节模组内部构件及其末端负载,对单关节模组的各项转角误差进行动态建模分析,建立考虑空间瞬时姿态的自驱动关节臂坐标测量机关节转角误差模型。
对于编码器本身选择必须达到足够的精度,反馈各臂、关节准确实时位置,以满足系统准确计算需要。
2)特性“稳”,指测量机各臂在静态或动态时各机构需要保持足够的稳定性,以达到重复测量精度。由于测量机臂长较长,为减少大扭矩带来不同位置臂展的变形,对于测量臂及关节轴系的重量提出高要求。
臂展部件,要求系统刚性足够,线性热膨胀系数小,材料采用碳纤维材料,做成薄壁中空结构。
关节部分主要由伺服电机、减速器、轴承、编码器、连杆连接装置等部件构成。要求重量轻,扭力大。如下图示。

测量臂一般由3个关节组成,即肩关节、肘关节和腕关节。以A-B-C-D-E-F-G旋转轴(下图)为例
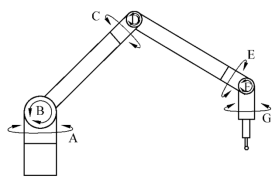
旋转轴B需要提供力矩最大,A轴也同样选用大扭力轴系,保证系统稳定性。A、B关节选用大功能伺服电机+谐波减速器方案,可以有效保证AB轴的稳定。E、F、G轴采用无框BLDC电机方案以减少长臂端自重,无框电机由于只有定、转子两部分,其它传动部件及外壳都由机架支撑,可以将整体重量做到最小,BLDC可以提供更大的低转扭力。在满足系统稳定性以及能够提供足够测力的条件下,单轴电机重量可以控制在30g以下。C、D轴根据实际臂长确定选择方案。整体系统用ANSYS Workbench进行仿真分析优化设计以确定配置。
3)特性“活”,主要是使用灵活,从产品标定到测量过程,都要做到足够简单灵活。为保证“稳”,整体产品的重量控制到比较理想的状态,移动灵活性可以得到保障。随装随用的灵活要求,选定编码器须选用高精度绝对式角度编码器。以确保系统通电即能知道其空间位置,减少标定频次。绝对式圆容栅技术的高精度可以达到0.5 arc sec,其精度高、结构简单的特性可以满足使用。
灵活使用还包括在使用上,利用终点标定法,系统智能学习法,除传统手动编程方式外,实现拖拽教学方式,减少使用难度,准确测量动作。
3、结语
自驱动关节臂坐标测量机,作为先进制造数字化技术的集成者,横跨机械、材料、控制、测量、计算机、人工智能学习等多项技术。基于测量精度要求越来越高,随着相关技术的进步,特别是空间算法、误差理论领域的进步,可以大幅度提高测量精度或减少制造难度,相关研究还有非常大的进步空间。专注本领域技术同时,更要做到与时俱进,
参考文献:
[1]冯旭刚,朱嘉齐,章家岩. 关节臂式坐标测量机的数学建模及参数标定[J]. 仪器仪表学报, 2019, 40(02): 190-197.
[2] 沈梅.自驱动关节臂坐标测量机精度提升理论与技术研究[D].安徽理工大学,2022.
[3] 王学影,王华,陆艺,张培培.关节臂式坐标测量机参数标定方法[J].农业机械学报,2016(6):408-412.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



