国网北京市电力公司大兴供电公司 北京 102600
摘要:变电站是电力系统的重要组成部分,为保障变电站能够正常运行,需要定期进行停电检修工作,可有效减少故障发生次数,但是,大面积停电作业会对电力用户产生较大的影响,影响日常生产生活。基于此,本文就变电站智能巡检系统展开研究,首先对系统总设计进行了概述,其次对其中的遥控模块进行设计,最后对其应用进行了分析,以期能够提高变电站检修效率和质量。
关键词:变电站;智能巡检机器人;遥控模块
电网系统中,变电站是关键节点,其所包含的电气设备较多,需要定期检修,及时发现问题并解决问题,以确保变电站能够安全、高效运行。当前,我国大多数供电企业都是由专业技术人员定期停电检修变电站,进而确保变电站及设备安全稳定运行,但是这种停电检修的方式对于技术人员专业性、工作经验要求较高,尽管能够及时发现存在的缺陷,但是受到技术和经验限制有些缺陷解决不到位,甚至会对检修人员的人身安全造成影响,不仅会导致线路停电,影响百姓及用电客户生产生活,对社会经济发展也产生了不利。
一、智能巡检机器人系统总设计
智能巡检机器人系统可以取代技术人员开展变电站巡检工作,可以收集巡检信息,之后分析所收集的信息后下达巡检命令,通过机器人本身具备的移动、操作、辅助等系统进行巡检作业。智能巡检机器人系统可以在变电站中实现远程遥控和通信,其工作流程需要满足运行人员或是基站系统下达的巡检任务,之后才能够启动机器人[1]。巡检时,巡检中心与巡检系统二者互相交换信息,进而确定机器人停靠部位,之后拍摄图像,分析拍摄的图像,按照分析得到的评价情况下达指令。如图1,其为智能巡检机器人系统结构。
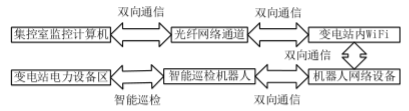
图1 智能巡检机器人系统结构
二、智能巡检机器人遥控模块设计
智能巡检机器人设计中,遥控模块是关键模块,其能够对机器人进行移动、视场、充电等控制。其中移动控制可以对机器人的行进和移动启停进行控制,视场控制通过云台电机控制收集数据,进而转换方向。充电功能控制是通过控制模块对机器人电池情况进行检测,自动判断电量使用,自动导航充电。
(一)硬件设计
智能巡检机器人遥控模块的核心在于控制板,其中包括了微处理器、电机驱动、角度采样、通信和供电这几部分。
1.微处理器。采用ATmega128单片机和外围IO电路,其中单片机能够存储控制程序、参数和预置位数据,其利用PWM输出口连接电机控制模块,并在SPI断开与串行口连接角度采样和通信这两个功能。
2.电机驱动。采用NS公司推出的直流电机驱动H桥芯片LMD18200,其电压最高可以达到55V,峰值输出电流可以达到6A,持续输出的电流为3A电流,且具备温度报警与过热保护性能。
3.角度采样。在单片机上的AD转换功能基础上外扩了12位AD转换芯片---TLC2543,进而提高水平运动上的角度分辨率。
4.通信供电。采用RS485通信,并利用电源隔离和信号传输广电隔离将干扰通道,减少通信线路中引入干扰的可能。同时,在其中添加PCB内部电源层、地层、元器件布局、去耦电容等防止电机运行时受到的干扰。
(二)软件设计
硬件设计完成后,需要进行软件设计,其中包括了模块功能、算法和软件设计。
1.模块功能。巡检机器人的遥控模块不仅需要能够根据要求动作,同时还需要满足参数设置、运行监控等性能。基于此,遥控模块需要具备姿态调整、预置位设置和调用、控制直接数据、参数设置、精度补偿、运行查询等功能。为了满足这些要求,本研究设置了遥控协议,巡检机器人可以在该协议的基础上实现遥控,同时也能够在安防监控中应用。该协议帧格式为:
![]()
图2 帧格式
2.控制算法。遥控模块能够控制云台运行速度与姿态。运行速度控制是由PWM脉宽决定的,姿态控制是按照水平、垂直部位的角度反馈闭环实现的。为精确控制姿态,本研究利用PID控制方法。该方法中,积分环节能够起到消除稳态误差的作用,有效提升系统控制的精度。对于该遥控模块而言,通过直接控制角度偏差实现遥控[2]。本研究根据遥控模式特点,通过积分分离PID控制方法进行控制计算,具体算法为:

图3 控制算法
3.控制软件。对于遥控系统而言,角度采样与电机控制一直是重点。为了满足遥控系统对于随机事件的处理,该模块中设置了混合式系统架构,其能够进行角度采样、采集系统状态等,并在中断处理例程帮助下处理随机事件。遥控功能汇总包括了通信解码和采用控制两部分。
三、智能巡检机器人遥控模块应用
(一)功能实现
1.自动巡检
巡检机器人主要功能就在于自主巡检,机器人在对变电站进行巡检时,可以根据预设路径、时间开展自动化巡检作业,同时能够收集电力设备目标数据,并将其上传到远程控制中心,进而分析数据,在全部预设目标设备都收集完数据之后,机器人会自动导航到充电站实现自主充电,为下一条命令待命。
2.远程遥控
远程遥控巡检就是在除了自主巡检时间内,控制中心监测某电力设备时,可以利用远程操控使机器人受到远程遥控改变预定路线,移动到想要监测的电力设备部位,进行对应的作业。
(二)具体应用
某电网已经具备无人值守变电站基本条件,本研究在此基础上对该电网某变电站进行智能巡检测试。该变电站中,运维人员需要对电力设备的计量表和运行数据进行巡视监测,一般是15天为一巡检周期,巡检小组为6人,在巡检机器人未应用前,运维人员需要深入实地检查设备,其工作时长为75h和34h,在巡检机器人应用后,远程遥控机器人检查设备,其工作时长为59h和20h。由此可见,在应用智能巡检机器人后,利用远程遥控功能可以提高设备巡检效率,缩短时间,准确收集数据,对于无人值守变电站的建设和发展起到了积极的作用。
结束语:
本研究对变电站智能巡检机器人中的遥控模块进行设计,利用远程遥控动作能够实现自动收集数据、转换方向、自动充电等作用,有利于提高巡检机器人的作业效率和应用效果。
参考文献:
[1]赵昕,彭志远,赵松璞,等.变电站智能巡检机器人的系统设计研究[J].电力系统装备,2019,000(024):147-148.
[2]陈龙清.机械自动化设计与制造存在的问题及改进方法[J].科学技术创新,2015(25).

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



